《机械设计》知识点整理-链传动
本文最后更新于 2021年9月12日 晚上
近期正在编写的新书《机械设计》知识点整理 中 第九章 链传动 刚刚完成了第一稿,这也是新书完成编写的第一个章节,特摘至博客以示纪念
9-1 链传动的特点及应用
链传动是一种挠性传动,通过链轮轮齿与链条链节的啮合来传递运动和动力。
组成:
- 链条
- 小链轮
- 大链轮
链传动优点:
- (与摩擦型带传动比)
- 保持准确的平均传动比
- 传动效率高
- 作用于轴上的径向压力小
- 链传动的整体尺寸较小,结构较为紧凑
- 能在高温的潮湿环境中工作
- (与齿轮传动比)
- 制造安装精度要求较低
- 成本较低
- 在远距离传动时,比齿轮传动轻便得多
链传动缺点:
- 只能实现平行轴间链轮的同向传动
- 运转时不能保持恒定的瞬时传动比
- 磨损后易发生跳齿
- 工作时有噪声
- 不宜用在载荷变化很大、高速、急速反向的传动中
应用场合:
- 要求工作可靠
- 两轴相距较远
- 低速重载
- 工作环境恶劣
- 其他不宜使用齿轮传动的场合
链条按用途分类:
- 传动链
- 短节距精密滚子链(简称滚子链)
- 齿形链
- 输送链
- 起重链
9-2 传动链的结构特点
滚子链
- 一般传递的功率在 100kW 以下
- 链速不超过 15m/s
- 推荐使用的最大传动比 = 6
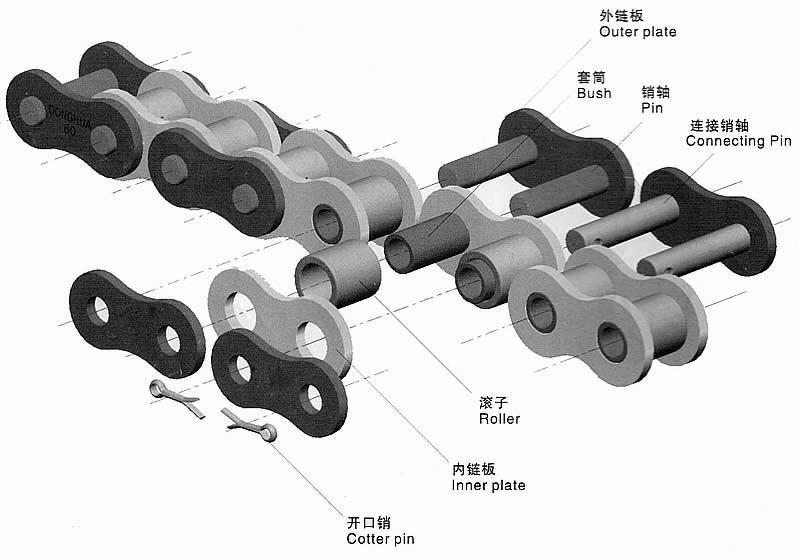
滚子链结构:
- 滚子
- 套筒
- 销轴
- 内链板
- 外链板
配合方式:
- 过盈配合
- 内链板与套筒之间
- 外链板与销轴之间
- 间隙配合
- 滚子与套筒之间
- 套筒与销轴之间
活动方式:
- 内、外链板相对挠曲时,套筒可绕销轴自由转动
- 滚子活套在套筒上,工作时沿链轮齿廓滚动,以减轻齿廓的磨损
- 销轴与套筒接触面是链的主要磨损位置,应在内、外链板间留少许间隙,便于润滑油渗入
链板制成 8 字形:
- 使各个横截面具有接近相等的抗拉强度
- 减小链的质量和运动时的惯性力
多排链:
传递大功率时可以使用多排链,排数越多承载能力越强
但受限于精度,各排链承受的载荷不易均匀,故排数不宜过多

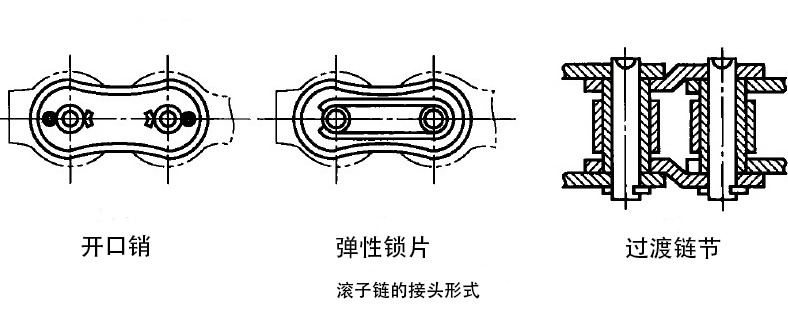
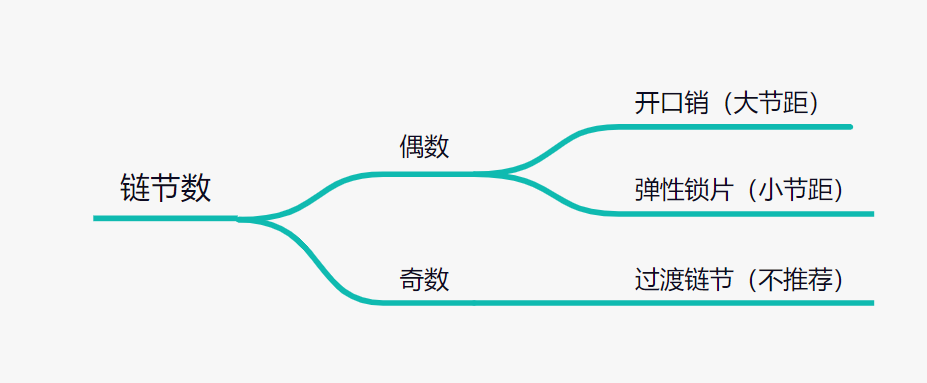
接头形式:
滚子链和链轮啮合的基本参数:
- 节距 (主要参数)
- 滚子外径
- 内链节内宽
- 排距 (多排链)

我国链条标准:
GB/T 1243-2006
链号数 × = 节距值
后缀 A 或 B 表示 A 系列(适用于以美国为中心的西半球区域,主要)或 B 系列(欧洲区域)
滚子链的标记:
链号 - 排数 - 整链链节数 标准编号
例:08A-1-88 GB/T 1243-2006 表示 A 系列、节距 12.7 mm、单排、88节的滚子链
齿形链
又称无声链,由一组带有两个齿的链板左右交错并铰接而成
齿楔角:
- 每个链板的两个外侧直边(工作边)间的夹角
- 一般为60°

内导板齿形链导向性好,工作可靠,适用于高速重载传动
链轮宽度大于25 ~ 30 mm 时,一般采用内导板齿形链

外导板齿形链结构简单但导向性差,链轮宽度较小时使用
齿形链优点:
- 传动平稳、噪声小
- 承受冲击性能好
- 效率高
- 工作可靠
应用场合:高速、大传动比、小中心距等工作条件较为严酷的场合
齿形链缺点:结构复杂、难于制造、价格较高
9-3 滚子链链轮的结构和材料
链轮由轮齿、轮缘、轮辐和轮毂组成。链轮设计主要是确定其结构和尺寸,选择材料和热处理方法。
链轮齿形
非共轭啮合
实际齿槽形状取决于加工轮齿的刀具和加工方法,并应使其位于最小和最大齿槽形状之间
查表:滚子链链轮的齿槽形状
链轮的基本参数和主要尺寸
基本参数:
- 配用链条的节距
- 滚子外径
- 排距
- 齿数
链轮的主要尺寸和计算公式:查表
链轮的结构
| 尺寸 | 结构 |
|---|---|
| 小直径 | 整体式 |
| 中等直径 | 孔板式 |
| 大直径 | 可将齿圈用螺栓连接或焊接在轮毂上 |
链轮的材料
小链轮应采用较好的材料制造
链轮常用材料和应用范围:查表
9-4 链传动的工作情况分析
链传动的运动特性
当链绕在链轮上时,其链节与相应的轮齿啮合后,这一段链条将曲折成正多边形(边长 ,边数 )的一部分(见图)。
链的平均速度 (m/s)为
| 字母符号 | 含义 |
|---|---|
| 、 | 主、从动链轮的齿数 |
| 、 | 主、从动链轮的转速,r/min |
链传动平均传动比:
链速瞬时变化:
前提:主动链轮转速恒定

铰链 实际用于牵引链条运动的速度 为
为主动链轮的分度圆半径,m
链速最低
链速最高
链速变化呈周期性,链轮转过一个链节,对应链速变化的一个周期
转速越高、齿数越少,链速变化范围越大
铰链 带动链条上下运动,上下运动的链速 也随链节周期性变化
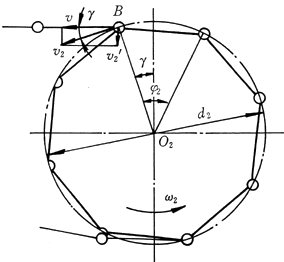
从动链轮上,铰链 沿圆周方向运动的线速度
由此,从动轮转速为
在 内不断变化, 也在变化,所以即使 为常数,也是周期性变化的
链传动瞬时传动比:
链传动多边形效应:
链传动的传动比变化与链条绕在链轮上的多边形特征有关
链传动的动载荷
链速变化引起的惯性力:
| 字母符号 | 含义 |
|---|---|
| 紧边链条的质量,kg | |
| 链条变速运动的加速度,m/s² |
视主动链轮匀速转动,当 时,
从动链轮因角加速度引起的惯性力为:
| 字母符号 | 含义 |
|---|---|
| 从动系统转化到从动链轮轴上的转动惯量,kg · m² | |
| 从动链轮的角速度,rad/s |
链轮转速越高、节距越大、齿数越少,则惯性力越大,相应动载荷越大;同时链条沿垂直方向的变速运动也会产生一定的动载荷
链节和链轮啮合瞬间的相对速度,也将引起冲击和振动:节距越大、链轮转速越高,冲击越严重
链传动的受力分析
链条安装时应有一定的张紧力——通过使链条保持适当的垂度所产生的悬垂拉力
紧边拉力与松边拉力:
| 字母符号 | 含义 |
|---|---|
| 有效圆周力,N | |
| 离心力引起的拉力,N | |
| 悬垂拉力,N |
有效圆周力:
| 字母符号 | 含义 |
|---|---|
| 传递的功率,kW | |
| 链速,m/s |
离心力引起的拉力:
为链条单位长度的质量,kg/m
悬垂拉力:
其中:
| 字母符号 | 含义 |
|---|---|
| 链传动的中心距,mm | |
| 垂度系数,查表 |
9-5 滚子链传动的设计计算
链传动的失效形式
- 链的疲劳破坏
- 经过一定循环次数后,链板将会因疲劳而断裂
- 套筒和滚子表面将会因冲击而出现疲劳点蚀
- 链条的疲劳强度为决定链传动承载能力的主要因素
- 链条铰链的磨损
- 使链节距增大,链条总长度增加
- 使链的松边垂度发生变化
- 增大运动的不均匀性和动载荷,引起跳齿
- 链条铰链的胶合
- 胶合在一定程度上限制了链传动的极限转速
- 链条的静力破坏
- 当链速较低时( < 0.6 m/s),如果链条负载不增加而变形持续增加,即认为链条正在被破坏
- 导致链条变形持续增加的最小负载将限制链条能够承受的最大载荷
链传动的额定功率
极限功率曲线:
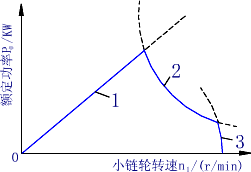
- 在润滑良好、中等速度下,链传动的主要承载能力主要取决于链板的疲劳强度
- 随着转速提高,链传动的动载荷增大,传动能力主要取决于滚子和套筒的冲击疲劳强度
- 当转速很高时,胶合将限制链传动的承载能力
额定功率曲线:
采用额定功率 限制链传动的实际工作能力
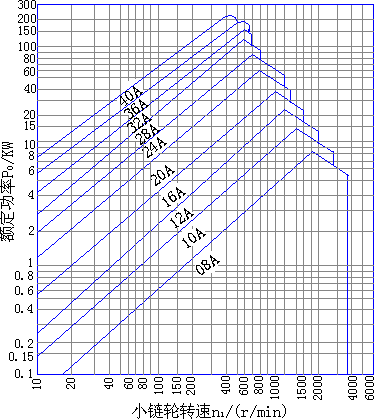
通过试验确定额定功率曲线,一个试验条件:查表
当链传动的工作条件与试验条件不同时,额定功率应予以修正。修正时考虑工作情况、主动链轮齿数、链传动的排数
链传动的参数选择
链轮齿数 和
链轮齿数过少的缺点:
- 增加运动的不均匀性和动载荷
- 链条在进入和退出啮合时,链节间的相对转角增大
- 链传动的圆周力增大,从整体上加速铰链和链轮的磨损
- 链轮最小齿数 = 9
- ≥ 17 (一般)
- ≥ 25 (高速传动或承受冲击载荷的链传动)、链轮应淬硬
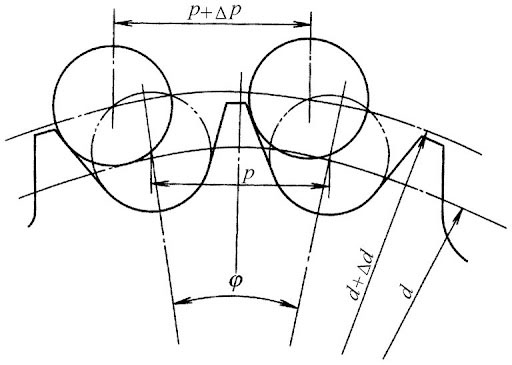
链轮齿数过多的缺点:
- 增大传动总体尺寸
- 易发生跳链、脱链:链节增长量 一定时,链轮齿数越多,链轮上一个链节所对的圆心角就越小,铰链所在圆的直径的增加量 越大,铰链会更接近齿顶(如图),从而增大跳链和脱链机会
- ≤ 150,一般 ≤ 114
常取链轮齿数为奇数,并尽可能与链节数互质:链节数通常为偶数,这样可以使链条和链轮磨损均匀
传动比
- ≤ 6 (一般)
- 2 ≤ ≤ 3.5 (常用)
- 链条在小链轮上的包角不应小于120°
中心距
中心距过小的缺点:
- 单位时间内链条的绕转次数增多,链条曲伸次数和应力循环次数增多,加剧链条的磨损和疲劳
- 链条在小链轮上的包角变小,每个轮齿所受的载荷增大,易出现跳齿和脱链现象
中心距太大的缺点:松边垂度过大,传动时造成松边颤动
| 情况 | 中心距取值 |
|---|---|
| 无其他限制 | = (30 ~ 50) |
| 无其他限制,无张紧装置或托板 | = 80 |
| 有张紧装置或托板 | 可以大于80 |
| 中心距不能调整 |
链的节距 和排数
节距大可以提高承载能力
节距大的缺点:
- 总体尺寸增大
- 多边形效应显著
- 振动、冲击、噪声更严重
| 工作情况 | 链的节距排数选择 | 理由 |
|---|---|---|
| —— | 较小节距单排链 | 使结构紧凑、延长寿命 |
| 速度高、功率大 | 小节距多排链 | —— |
| 中心距小、传动比大 | 小节距多排链 | 经济 |
| 中心距大、传动比小 | 大节距单排链 | 经济 |
滚子链传动的设计计算
已知条件:
- 链传动的工作条件
- 传动位置与总体尺寸限制
- 所需传递的功率
- 主、从动链轮转速 、 或传动比
设计内容:
- 链条型号、链节数 、排数
- 链轮齿数 、
- 链轮的材料、几何尺寸
- 链传动的中心距
- 压轴力
- 润滑方式、张紧方式等
设计步骤和方法:
(1)选择链轮齿数 、 和确定传动比
链轮齿数一般为 17 ~ 114
传动比:
(2)计算当量的单排链计算功率
| 字母符号 | 含义 |
|---|---|
| 工作情况系数,查表 | |
| 主动链轮齿数系数, | |
| 多排链系数,对双排链取值 1.7,三排链取值 2.5 | |
| 传递的功率,kW |
(3)确定链条型号和节距
链条型号:查表(根据当量的单排链计算功率 、单排链额定功率 、主动链轮转速 )
确定链条节距 :查表
(4)计算链节书和中心距
初选中心距 = (30 ~ 50) ,按下式计算链节数
为避免使用过渡链节,应将计算出的链节数 圆整为偶数
链传动最大中心距为
为中心距计算系数,查表
特别地,当两链轮的齿数相等( )时,链传动的最大中心距为
(5)计算链速 ,确定润滑方式
链的平均速度 (m/s)计算公式:见 9-4-链传动的运动特性
润滑方式:查表
(6)计算链传动作用在轴上的压轴力
| 字母符号 | 含义 |
|---|---|
| 有效圆周力,N | |
| 压轴力系数。对于水平传动,取值 1.15;对于垂直传动,取值 1.05 |
9-6 链传动的布置、张紧、润滑与防护
链传动的布置
链轮必须位于铅垂面内,两链轮共面
中心线可以水平或倾斜,尽量不要处于铅锤位置
紧边在上,松边在下
具体布置:查表
链传动的张紧
目的:避免在链条的松边垂度过大时产生啮合不良和链条的振动现象、增加链条与链轮的啮合包角
张紧方法:
- 调节中心距(中心距可调时)
- 张紧轮
- 链轮或滚轮
- 直径与小链轮的直径相近
- 自动张紧(弹簧、吊重等)或定期张紧(螺旋、偏心等调整装置)
- 压板、托板
链传动的润滑
润滑作用:缓和冲击、减轻磨损、延长链条使用寿命
推荐润滑方式:查表
链传动的防护
应用防护罩将链传动装置封闭,与灰尘隔离以保证正常润滑