V2X-与万物互联的车联网
本文最后更新于 2022年3月28日 中午
V2X简介
V2X 全称 Vihicle-to-everything,即车与任何事物的联系,主要包括
- V2I 车与基础设施 (vehicle-to-infrastructure)
- V2V 车与车 (vehicle-to-vehicle)
- V2P 车与人 (vehicle-to-people)
- V2N 车与云 (vehicle-to-network)
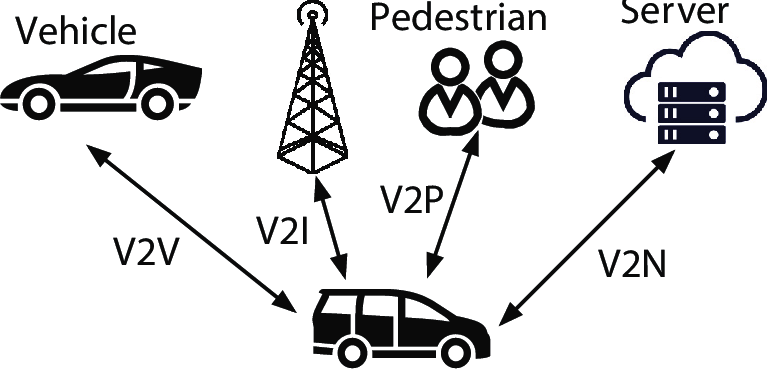
详细来说,V2X是一种网状网络,网络中的节点(汽车、智能交通灯等)可以发射、捕获并转发信号。利用V2X,车辆可以获取周围环境的未知参数及附近车辆的运动状态,这些状态包括速度、位置、行驶方向、制动等基本的安全信息。然后车载端主动安全算法将处理所获取的信息,并按照优先级对信息进行分类,对可能发生的危险情景进行预警,紧急情况下可以利用车辆执行端对车辆进行控制从而规避风险。V2X技术开启了对四周威胁的360°智能感知,这一技术能够在各种危险情况下提醒驾驶员,从而大大减少汽车碰撞事故的发生并缓解交通拥堵。
V2V和V2P是基于广播功能实现车与车、车与人之间的信息交互,例如提供位置、速度和方向信息用以避免车祸的发生。V2I是车与智能交通设施之间的信息交互。V2N是车与V2X服务器、交警指挥中心之间的信息交互,V2V/V2I/V2P/V2N之间的交互是一个闭环的生态系统。
车联网架构
按照网络架构划分,车联网的体系结构可以划分为感知层、网络层和应用层三层:
感知层
实现感知数据辅助驾驶的功能
网络层
实现车联网网络接入、数据分析、数据传输以及车辆节点管理等功能。网络层还为终端用户提供实时的信息交互以及无线资源的分配,达到信息负载的平衡以及异构网络的无缝衔接访问功能。
应用层
应用层是车联网体系架构的最高层,主要为用户提供不同的服务。根据不同用户的需求提供不同的应用程序,例如车载娱乐、远程监控、紧急救援等功能。
无线通信技术
DSRC
DSRC工作在5.9GHz频带上,带宽范围为75MHz,通信距离在1000m左右。DSRC 的 标 准 是 IEEE802.11,它 使 用 的 MAC 协议简单且特征明显,可实现分布式操作,主要应用于 ad-hoc(点对点)通信模式,目前美国在该技术的发展上相对成熟。根据需要提供的 V2X 应用程序类型和支持通信标准的不同,每个 DSRC 频段可以以单个频道进行使用,也可以分成多个通道进行使用。
C-V2X
随着蜂窝通信技术的发展,蜂窝通信扮演的角色越来越重要,现在蜂窝通信技术已经从单纯的传递声音变成向传递音频、数据转变,也从 Person-to-Person 向 Machine-to-Machine 变革,V2X 技术就是 M2M 变革的一项应用。
C-V2X 是由 3GPP(3rd Generation Partnership Project)定义的基于蜂窝通信的 V2X 技术,它包含基于 LTE 以及未来 5G 的 V2X 系统,是 DSRC 技术的有力补充。它借助已存在的 LTE 网络设施来实现 V2V、V2N、V2I 的信息交互,这项技术最吸引人的地方是它能紧跟变革,适应于更复杂的安全应用场景,满足低延迟、高可靠性和满足带宽要求。
2015 年初,3GPP 正式启动基于 C-V2X 的技术需求和标准化研究,2015 年初 3GPP 需求工作组开展了 C-V2X 需求研究,于 2016 年 3 月完成结项;2016 年初 3GPP 架构工作组启动 C-V2X 架构研究,于 2016 年底完成标准化。
在 C-V2X 研究方面,3GPP 无线技术工作组于 2015 年 7 月启动 SI 立项,于 2016 年 6 月完成结项;2015 年 12 月,针对车车直连 V2X 标准项目 “基于 LTE PC5 接口的 V2V” 启动立项,并于 2016 年 9 月完成标准化;2016 年 6 月针对车路 / 车人等 V2X 标准项目 “基于 LTE 的 V2X 业务” 启动立项,于 2017 年 3 月顺利完成项目研究。
2016 年 9 月,在 LTE 标准化机构 3GPP 第 73 次会议上,C-V2X 的 V2V 标准在 Release14 中正式冻结,这标志着 3GPP 完成了 LTE -V 第一阶段的标准,即基于终端直通(D2D)模式的车车通信(V2V)标准化,通过深入研究引入了更优化的物理层解调参考信号、资源调度、干扰协调等技术。
另外,2017 年 4 月在法国巴黎举行的 ISO TC 204 第 49 次全会上,中国提出的 C-V2X 标准立项申请获得通过,确定 C-V2X 成为 ISO ITS 系统的候选技术。在 2017 年 9 月完成第二阶段 C-V2X 标准发布,包括基于蜂窝网的 V2V 通信(V2V)和车路通信(V2I)、车人通信(V2P)等。
应用场景
V2V安全应用场景
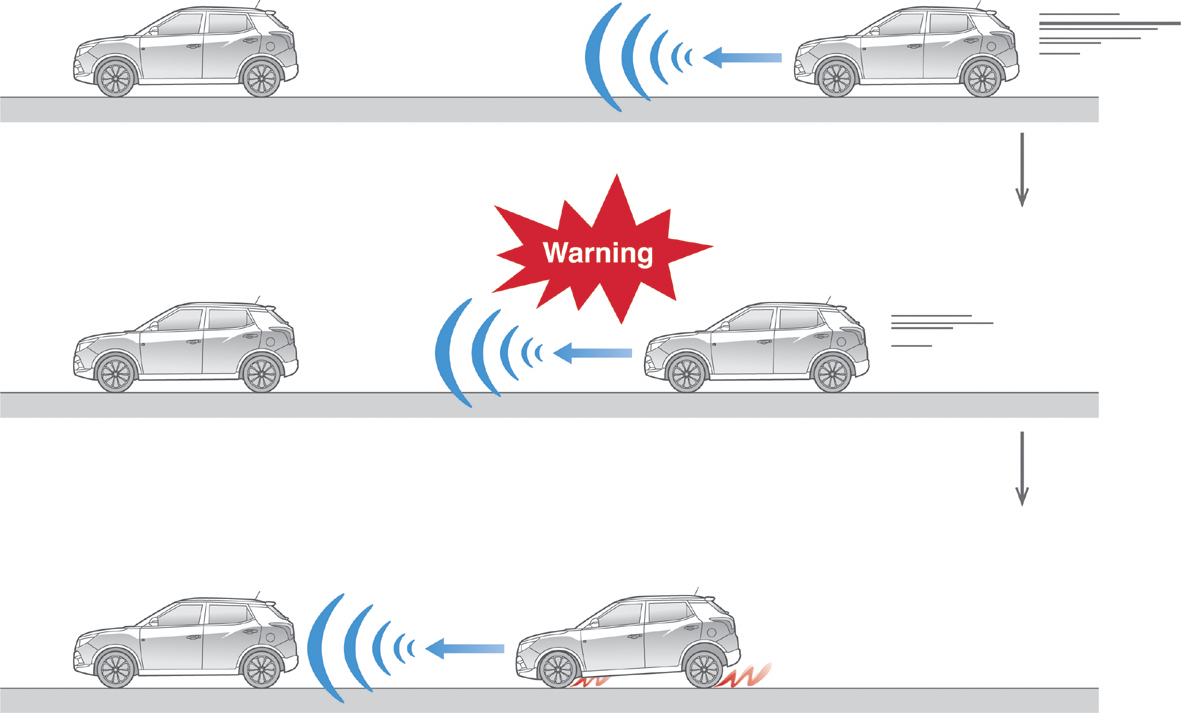
1、 FCW:前碰撞预警(Forward Collision Warning)
提示驾驶员前方有碰撞风险,提前减速避让。甚至可以实现对驾驶员视野范围之外的前方车辆停车减速事件做出预警,这对避免高速公路连环追尾事故很有帮助。
2、 CLW:失控预警(Control Losing Warning)
当车辆失控时,将车辆失控信息至少提供给周边左右1.5m,前后150m的车辆,周边车辆收到信息后提示驾驶员进行紧急避让,减少事故发生。
3、 EEBL:紧急电子刹车灯(Electronic Emergency Brake Light)
当周边车辆(不一定在同一车道上)进行紧急制动时,向周边车辆发送急刹预警信号,驾驶员接收到预警信号后提前做好减速、避让准备。
4、 DNPW: 禁止通过预警(Do Not Pass Warning)
在双向两车道的道路上行驶时,后方车辆想要超过前方车辆,必须要临时占用对向车道,当本车与对向车辆有超车碰撞隐患时,此时及时提醒驾驶员谨慎通过。
5、 LTA:左转辅助(Left Turn Assist)
在驾驶员想要进行左转向时,此时对向如果有车辆正在靠近,系统及时提醒驾驶员注意前方车辆。可由驾驶员打开转向灯触发此功能。
6、 IMA:交叉路口辅助(Intersection Movement Assist)
车辆通过复杂路口时通过V2V技术相关通讯,理解对方行驶意图,减少事故发生的概率,在无信号灯的路口直行、左转,在有信号灯的路口右转,闯红灯和闯禁行区都有较好的应用,及时提示驾驶员注意路口周边车辆。
7、 BSW/LCW:盲区/变道预警(Blind Spot Warning/Lane Change Warning)
驾驶员驾驶车辆时,在车身的左右后侧方都存在一个视觉盲区,驾驶员很难察觉到视角盲区的车辆。借助于V2V技术,驾驶员变道前能够及时察觉到盲区车辆,减少事故的发生。
V2I安全应用场景
如果说V2V是两个“动态”物体间交互的话,V2I就是“一动一静”物体间的连接,主要有红灯预警、弯道限速预警、限速施工区域预警、天气预警、人行横道行人预警。
1、 RLVW:红灯预警(Red Light Violation Warning)

当车辆接近有交通信号灯的路口,即将亮起红灯,V2I设备判断车辆无法及时通过此路口时,及时提醒驾驶员减速停车,这与基于摄像头采集到红灯提醒功能类似,但是它的优点是能与交通设施进行通讯,尤其是在无红绿灯倒计时显示屏的路口具有“预知”红绿灯时间的作用,减少驾驶员不必要的加速和急刹。

同时交通信号灯也可以接收车辆发送的信号,例如,延长绿灯时间以允许长货车顺利通过路口。
2、 CSW:弯道限速预警(Curve Speed Warning)
车辆从平直路面进入转弯工况时,V2I设备接收到相关弯道限速信号后及时提醒驾驶员减速慢行,这与基于GPS地理信息导航提醒或摄像头采集到限速标志提示驾驶员慢行的功能类似。
3、 WZW:限速/施工区域预警(Reduced Speed/Work Zone Warning)
当车辆行驶至限速区域(如学校)附近时,通过路边V2I设备向驾驶员传递显示提示或者仅仅当车辆超过限定车速时才提示驾驶注意车速。当车辆行驶至限行区域(如燃油车限行、单双号限行、货车限行)、施工区域附近时,通过车载V2I设备向驾驶员提示前方即将进入限行区域。
4、 SWIW:天气预警(Spot Weather Impact Warning)
当车辆行驶至恶劣天气的地带时,如多雾、雨雪天气时,及时提醒驾驶员控制车速、车距以及谨慎使用驾驶员辅助系统,这与目前高速公路边的提示雨雪天气减速慢行的功能类似。
5、 Transit-PSCW:人行横道行人预警(Pedestrian in Signalized Crosswalk Warning)

人行横道线上安装有行人探测传感器,当车辆靠近人行横道时,交通信号设施向周边车辆发送行人信息,提示车辆减速及停车,这与通过雷达或摄像头实现的自动紧急制动(AEB)功能类似。
V2P安全应用场景
V2P通过手机、智能穿戴设备(智能手表等)等实现车与行人信号交互,在根据车与人之间速度、位置等信号判断有一定的碰撞隐患时,车辆通过仪表及蜂鸣器,手机通过图像及声音提示注意前方车辆或行人。
1、 行人道路预警
2、 倒车预警
V2X在自动驾驶领域应用前景
近年来,自动驾驶领域发展迅速。但随着对自动驾驶研究的深入,单车智能自动驾驶的局限性也凸现出来。例如,传感器探测距离有限,并且容易受到遮挡;单车智能对于无信号交叉口通行等需要群体决策的场景无能为力。同时,考虑到车端传感器的安全冗余、传感器成本等因素,车路协同又一次被提及。车路协同是指,基于无线通信、传感探测等技术获取车辆和道路信息,通过车—车、车—路通信进行交互和共享,实现车辆和基础设施之间智能协同与配合,以达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标。车路协同目前成为自动驾驶落地的重要手段。
V2X是实现车路协同的重要技术。路侧传感器得到的感知信息可以通过V2I通信传输给自动驾驶车辆,自动驾驶车辆可以根据通过V2I通信获得的感知信息实现自动驾驶功能。路测计算设备可以作为控制中心,自动驾驶车辆通过V2I通信将自身的运动状态、驾驶意图等信息上报到路测计算设备,路测计算设备可以综合所有车辆的信息,指导车辆协同通行。
车路协同可以首先在限定场景下实现。例如在高速公路部署车路协同设备,低阶别(L2、L3)自动驾驶车辆可以根据路测感知实现高级别(L4及以上)自动驾驶。又如在停车场,车辆可以根据部署在停车场内的摄像头、雷达等传感器,实现自主泊车。
发展现状与趋势
C-V2X占优势,DSRC或已经淘汰
2020年11月,美国联邦通信委员会(FCC)正式投票决定将 5.9 GHz 频段(5.850-5.925GHz)划拨给 Wi-Fi 和 C-V2X 使用。FCC 正式宣布放弃 DSRC 并转向 C-V2X,意味着由我国主推的 C-V2X 或将成为全球车联网唯一的国际标准。
作为 C-V2X 标准的提出者与推动者, 中国信科集团副总经理、专家委主任, 无线移动通信国家重点实验室主任陈山枝博士曾在接受媒体采访时表示:相比 802.11p ,C-V2X 作为有机结合蜂窝通信和直通通信的系统技术, 从根源上就具有解决低时延和高可靠性车车通信、车路通信特殊挑战的技术优势, 并具有清晰的平滑演进路线。同时, C-V2X 还能与 5G、MEC 等新的技术更紧密结合, 更好的支持智能交通和自动驾驶。总体上,C-V2X 的数据速率与 DSRC 相当,但延迟远低于 DSRC。
5G技术与C-V2X结合
网络切片技术
网络切片技术就是根据用户对时延、带宽、消息可靠性等功能的不同需求,将物理网络切分为多个端到端的虚拟网络,每个虚拟切片以性能指标的差异来适应不同的场景。这种虚拟网络划分方式不仅避免了为每一个服务建设一个专用物理网络的问题,而且为不同的应用场景提供相对隔离的网络环境。切片之间互不干扰,每个用户根据自身需求定制网络切片。
参考资料
- 车联网关键技术及其发展趋势与挑战-肖瑶
- V2X有哪些应用场景,车企们的量产部署都进展到什么程度了?