电动汽车电控技术之BMS、再生制动
本文最后更新于 2022年3月14日 凌晨
博文封面图:路斯特Evija纯电动超跑
引言
电动汽车技术的核心在于“三电”系统,即电驱系统、电池系统和电控系统。其中电驱和电池又受到电控系统的控制。
作为一名在电动汽车蓬勃发展时期修读车辆工程专业的学生,在有幸参与我校车辆工程专业导航课、倾听数位专家教授对车辆的不同方面的介绍及展望后,我对电动汽车电控技术有了浓厚的兴趣。就此进行研究学习,对电控,特别是电动车特有的电池管理和再生制动这两方面有了一定的了解,总结如下文。
1. 电池管理系统(BMS)
BMS: Battery Management System
能量管理系统是新能源电动汽车的核心。
其工作原理可以简单归纳为:由电子控制单元根据数据采集电路采集到的电池状态信息及相关信息,进行数据分析处理,并形成指令信息发送到相应的功能模块。
与电机控制技术相比,能量管理技术还不是很成熟。如何监控电池的充放电状态,避免过充电现象,实现电池无损充电;并对电池实行实时的检测、定期的诊断和维护,最大限度地保证电池的正常可靠运行,是很多学者正在研究的方向。而在能量管理系统中,数据采集模块的可靠性、剩余能量估算模块的精度、安全管理模块等方面有待进一步提高。
BMS系统主要功能
- 电池物理参数实时监测
- 电池状态估计、在线诊断与预警
- 均衡管理
- 功率分配
- 充、放电与预充控制
- 热管理
- ……

特斯拉超级充电桩,充电1小时即可为车辆增加300-500km续航。超高的充电速度背后是优异的BMS系统的支撑。
BMS 保证电池系统的设计性能
- 安全性:保护电池单体或电池组免受损坏,防止出现安全事故
- 耐久性:使电池长期在健康工作范围内工作,延长电池的使用寿命
- 动力性:保证电池输出功率满足车辆动力需求
BMS工作原理
不管车辆使用的是哪种锂离子电池,动力电池都是由一个个小的电池单体通过串、并联的方式组成电池组,再由电池组最终组成车辆的动力电池单元。

而在电池组中真正发挥储能作用的是电池组中每一个小小的电池单体,例如特斯拉使用的18650锂离子电池,其数字代表的是每一个电池单体的规格:直径为18mm,长度为65mm。一辆85kW‧h版本的Tesla Model S搭载的动力电池单元由接近7000节18650锂电池构成。
一辆汽车上有如此多的电池单体,每一个小的电池单体都是单独制造的。由于电池的电化学特性,二次锂离子电池出厂后的储能一致性是存在差别的。但充电时是从一个充电口来为所有电池充电。BMS系统要解决的问题就是,如何保证每个电池单体都充满电,并且不会因为过度充电对电池造成损害。
通常情况下,BMS系统都要通过检测模块和控制模块两部分来确定如何管理电池组。
检测模块的实现相对简单一些,主要是通过传感器收集电池在使用过程中的参数信息,如:每个电池单体的电压、电流,电池组的电压、电流、温度等。这些数据在之后的电池组管理中起到至关重要的作用。
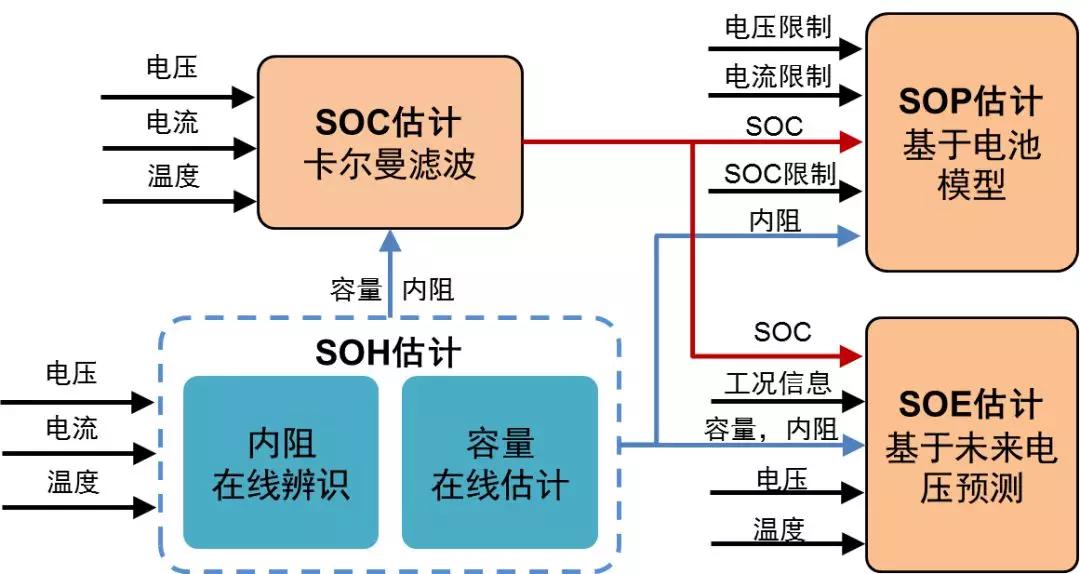
根据收集到的数据,BMS系统就会根据每一个电池单体的实际情况来分配如何为电池充电,哪一个电池单体已经充满可以停止给它充电等。并且在使用过程中,通过状态估算的方式确定每一颗电池的状态,通过SOC(State Of Charge)、SOP(State Of Power)、SOH(State of Health)以及均衡和热管理等方式来实现对电池的合理利用。
SOC 电池荷电状态
SOC: State of Charge
电池的荷电状态,英文单词为State of Charge,简称SOC,顾名思义就是指电池中剩余电荷的可用状态,一般用一个百分比来表示。最经典的SOC的定义可以用以下式子来表示:
其中为电池的标称(额定)的电荷容量,为电池中剩余的电荷余量。如果认为为一个不变的值,也就是认为剩余的电荷余量总是等于标称容量减去已放出的电荷量的话,则SOC可以用以下一个等效的式子来表示:
其中Q_discharged表示在最近一次充满电之后,电池中已经放掉的电荷。
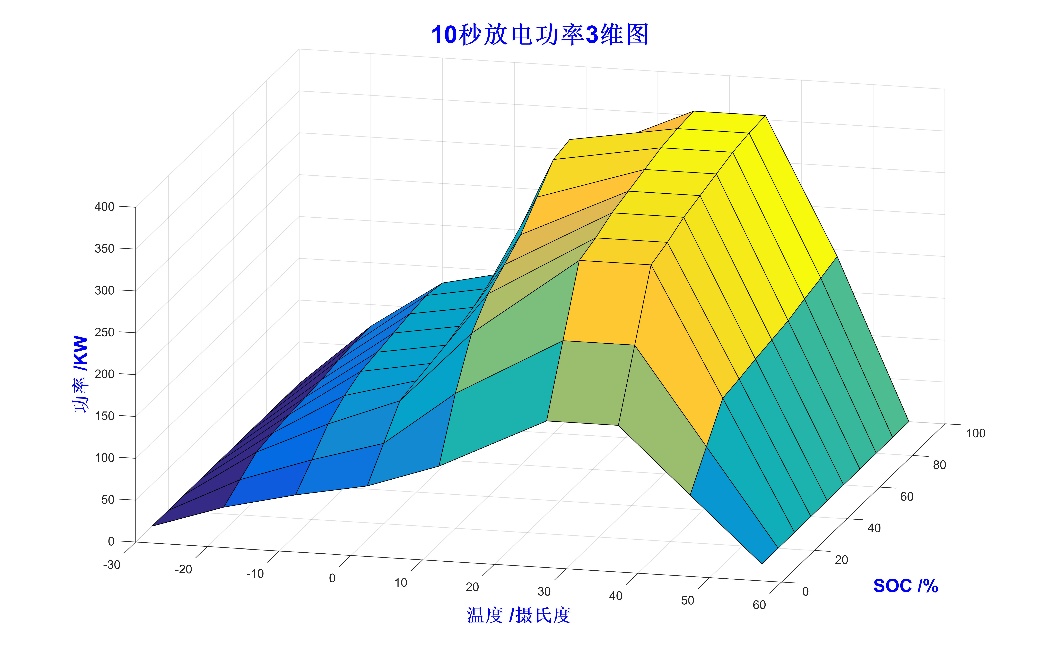
SOP 电池输出功率
SOP: State of Power
现阶段与锂电池相关的新能源汽车,分为纯电动汽车BEV,混合动力汽车HEV,与插电混合动力汽车PHEV,锂电池组无论是作为唯一动力源还是辅助动力源,电池组的可输出功率,直接体现到了车辆的动力输出特性上。而如何限值电池组的最大输出功率,就成为了电池管理系统BMS的SOX状态估算中的重要一环。State of Power(SOP)的的概念也经常与State of Function(SOF)结合在一起,称呼与概念范围略有不同,但是实质内容大同小异。
均衡
目前电池管理系统有主动式均衡和被动式均衡两种管理模式。两种管理模式各有优缺点。所采用的方式普遍为采集单体电池电压、串联电流、温度以及电池组的电压,运算模块对这些信息进行处理后发出指令,最后将整个处理的信息指令通过CAN通讯系统传送给汽车中央控制单元或整车VMS系统。
国内主流车用BMS厂家都有被动均衡技术,而且其中绝大部分都有主动均衡技术储备。在厂家给的配置单上,主动均衡是一个“选配”功能。被动均衡的BMS装机量较大,占据新能源汽车市场较高的份额,远远高于主动均衡BMS的市场份额。国内的新能源汽车主要是中低端产品,考虑到成本及配置需求方面,被动均衡相对较易接受。随着新能源汽车产品的向高端发展,对BMS的要求也越来越高,主动均衡技术将成为未来的发展趋势。
BMS系统构型

集中式管理系统(大BMS)
将所有的采集单体电压&电压备份和温度的单元全部集中在一块BMS板上,由整车控制器直接控制继电器控制盒。大部分低压HEV使用的是这样的结构。
优点:
- 结构简单,成本低
- 采集备份在同一块板上,相互间通讯简化
缺点:
-
由于单体采样线束较长,采样导线设计复杂、有额外电压压降
-
线束排布繁琐
-
整块BMS支持的最高通道数有限
-
仅用于较小的电池包
分布式管理系统(BMU+多个CSC)
BMU: 电池控制管理器
CSC:单体管理单元
将电池模组的功能独立分离,整个系统形成了CSC、BMU、S-Box继电器控制器和整车控制器,三层两个网络的形式。
典型的应用如德系I3、I8、E-Golf ;日系 IMIEV、Outlander ;Model S
优点:
- 将模组装配过程简化
- 采样线束固定较为容易
- 线束距离均匀,不存在降压不一的问题
- 可移植性好
缺点:
- 成本高
- 需要额外的MCU、独立CAN总线支持将各个模块信息整合发送至BMS
- 总线电压信息对齐设计复杂
半分布式管理系统(BMU + 少量大 CSC)
是上面两种模式的妥协。典型应用如Smart ED 、Volt。
2.再生制动控制系统
传统汽车的制动过程多依靠摩擦的方式消耗车辆行驶的动能而降低车速,其制动能量转化为热能散发到周围环境中去。而电动汽车在制动时,可以将牵引电机转换为发电机,依靠车轮拖动电机产生电能和车轮制动力矩,从而在减缓汽车速度的同时将部分动能转化为电能储存起来,回收了能量,提高了汽车的续航里程。

再生制动能量回馈系统的研究是电动汽车开发中的一个重要环节,其设计开发需要综合考虑汽车动力学特性、电机发电特性、电池安全保证与充放电特性等多方面的问题。
而这些性能的满足主要依赖于合理设计能量管理系统以及系统的控制策略。
再生制动的优势
再生制动能量回收除了有提高能量利用率的优点外,还有减小机械、液压制动的机械磨损,可实现更加精确的制动控制,降低传统汽车制动过程中因温度升高而产生制动热衰退现象等优势。
何时可用再生制动
采用再生制动技术,需要满足2个要求:
- 要满足制动效能、制动效能恒定性、制动时汽车的方向稳定性以及最大限度地提高制动能量的回收程度;
- 要满足司机操作的习惯、舒适性能的要求。
把电动车辆制动分为三种模式,以不同的控制策略应对:
-
紧急制动
对于制动加速度大于2 m/s² 的紧急制动,出于安全考虑,必须以机械摩擦制动为主,电气制动仅起辅助作用
-
中轻度制动
对于汽车一般工况下的制动过程,如遇到红灯减速、靠边停车等,可以分成减速与停止两个阶段。由电气制动完成减速阶段,机械摩擦制动完成停止阶段
-
长下坡连续制动
传统机械摩擦制动方式在应对连续长距下坡时往往受制于制动力热衰减问题。而电气制动不存在热衰减,同时能提供足以控制车速的制动力。可以在此种工况下完全使用电气制动。
再生制动控制策略
控制策略方面的3种典型控制策略有:
-
并行制动系统控制策略
-
最佳制动能量回收控制策略
-
理想制动力分配控制策略
其中,并行制动系统控制策略是在传统汽车制动系统的基础上加入电机制动,在制动时采用机械制动系统与再生制动系统联合制动;
最佳制动能量回收控制策略是在保证制动要求的前提下,最大限度地回收制动能量;
理想制动力分配控制策略是在保证最佳制动性能的前提下,尽量回收制动能量。
这3种控制策略中,并行制动系统控制策略较简单,另2种比较复杂,而且要求精确的计算和控制。总体来说,国内关于制动能量回收的研究还处在初级阶段。如何设计更加合理的系统及其控制策略以满足制动要求和人性化要求,使再生制动与电动汽车性能匹配更加优化将成为电动汽车研究的重要方向。

再生制动如何触发
在驾驶员踩下制动踏板时,制动控制单元根据制动踏板位移传感器采集的信号,来判断驾驶员的制动意图,计算所需的总制动力大小。如果根据制动策略,首先安排驱动电机介入制动,提供再生制动力,则出现电机回馈制动触发条件。
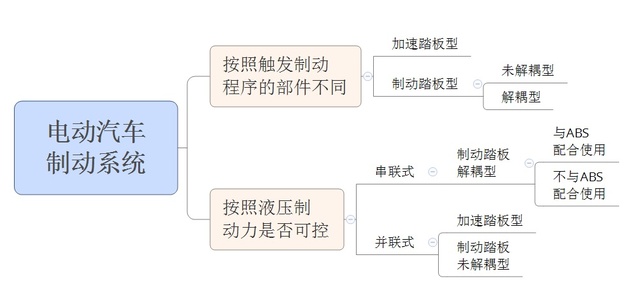
制动能量回馈系统,目前主要是复合利用回馈制动和液压制动两种制动形式。以制动程序的触发部件不同,划分为加速踏板型和制动踏板型;按照液压制动力是否可控划分为串联式和并联式两种形式。制动踏板型下,根据回馈制动和液压制动的复合形式不同划分为未解耦型和解耦型。
加速踏板触发型
以驾驶员完全放开加速踏板作为制动的触发信号。当驾驶员完全松开油门踏板,驱动电机转为制动模式,提供制动力,回收能量;若此时驾驶员又踩下制动踏板,则液压制动系统介入,与驱动电机同时工作,进行复合制动。
制动踏板触发未解耦型
仅以制动踏板的信号为制动依据。制动的前半段行程设定为再生制动工作区,后半段为再生制动与液压制动复合工作区。
制动踏板触发解耦型
制动踏板与液压制动系统之间完全没有机械连接。由复合制动控制单元BCU协调再生制动与液压制动工作。
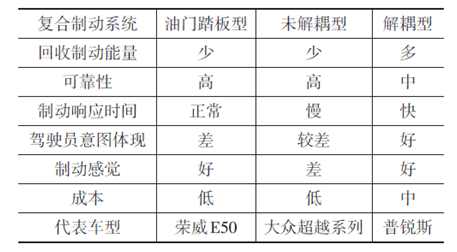
不同制动类型的特点
串联型,即制动踏板解耦型,由BCU发出指令,触发相应制动力加入。同时由传感器实时向BCU汇报制动力的施加效果,形成一个闭环控制系统。制动过程中,BCU独立于整车控制器工作,专门用于实现对复合制动踏板意图的识别和制动力分配。
并联型的两种形式,加速踏板型和制动踏板未解耦型,都是按照确定的顺序,先施加再生制动力,待到另一个触发信号出现,确定的加入液压制动力。
总结与感悟
通过本次研究性学习,我对电动车的电池管理系统和再生制动系统有了一定的了解。
锂电池的热失控是一个非常复杂而棘手的问题。直到今天,电动汽车自燃的新闻仍时不时发生,深刻提醒着我们BMS系统在安全性方面仍然迫切需要进一步提高。
结合市场销售情况来看,高续航里程的电动汽车往往有更好的销量。更优秀的BMS系统可以使电池组进行更高效的充放电;更智能多样化的再生制动策略,保证制动力性能前提下,可以进一步提高能量回收效率。这些都有利于提高续航里程。
许多习惯驾驶传统燃油汽车的驾驶员,在刚刚开始驾驶具有再生制动的混合动力或纯电动汽车时,表示不习惯于制动踏板的新特性。今年国内的一起特斯拉失控撞人的事故,就可能与加速踏板集成减速制动效果这一特性有关。如何优化再生制动,使制动踏板反馈力度、行程与制动力间的关系曲线更加符合驾驶员习惯,使驾驶更轻松,也是可以深入研究的问题。

期待进一步在车辆工程专业修读学习,在工学并举中成长,扎实掌握基础知识,可以在不久的未来投入到我国电动汽车的设计研究中去。
参考资料
参考资料以及图片来源链接