自动控制原理基础-01-绪论
本文最后更新于 2021年11月18日 凌晨
第一节 概述
理论基础是控制理论
控制论中心思想:通过信息的传递、处理与反馈来进行控制
经典控制理论:主要用于单输入—单输出控制系统的分析和设计,它主要是在复数域(特别是频率域)内利用传递函数(或频率特性)来研究和分析系统的稳定性、响应快速性与响应准确性等问题
现代控制理论:主要是在时间域内利用状态空间理论来研究和解决多输入—多输出、非线性、时变系统的最优控制等问题
第二节 控制系统的基本概念
控制系统的基本工作原理
控制系统组成部分:
-
控制器(控制装置):能够对被控对象产生控制作用的设备的总体
-
被控对象:系统中需要加以控制的机器、设备或生产过程
控制系统的任务:使被控对象的物理量按照预先给定的控制规律变化
“检测偏差并用以消除偏差”
反馈:对系统的被控制量进行测量,并加以处理(取其一部分或全部、或其函数等)后,再返回输入端与系统的给定量进行比较的过程
正/负反馈:反馈量对给定量起 增强/减弱 作用
反馈控制原理:基于负反馈基础上的控制原理
固有反馈(内在反馈):没有外加的检测装置,变量与变量之间相互制约,构成了闭合的因果关系
职能方框图:
- 表示系统的组成、各元件作用关系及信号传递(或流通)关系的图形
- 方框 —— 组成的元件
- —— 比较元件
- 负号(-) —— 负反馈
- 箭头方向 —— 信号流动方向
- 带箭头的直线上面标的符号 —— 传递的信号(物理量)
常用概念及术语:
- 系统
- 为了完成一定的任务而将一些具有一定功能的元、部件或设备组合起来的总体称为系统
- 系统具有相对性,在一个大的系统中可以包含一些小的子系统
- 输出量(输出信号、被控制量)
- 控制系统中需要加以控制的物理量
- 输入量(输入信号、给定值、给定量)
- 输入给控制系统用以控制输出量变化规律的物理量
- 扰动量(扰动信号)
- 指那些能使输出量偏离预订要求(期望值)的意外干扰因素
- 也是一种输入,但是是人们所不期望的
- 来自系统外部,或系统内部
- 反馈量(反馈信号)
- 把输出量取出并直接或经转换以后送回到输入端与输入端信号进行比较的物理量
开环、闭环和复合控制系统
开环控制系统
系统的输出量和输入量之间没有反馈作用,输出量对系统的控制过程不发生影响
精度取决于输入信号和组成系统的各工作环节的工作精度,各种干扰因素对其有明显影响
优点:系统结构比较简单、成本低、响应速度快、工作稳定
适用场景:系统的干扰因素和元件特性变化不大,或可预先估计其变化范围并可预先加以补偿
闭环控制系统
又称反馈控制系统
系统的输出量与输入量之间具有反馈联系,即输出量对系统的控制过程有直接影响
优点:当系统的元件特性发生变化或出现干扰因素时,引起的输出量的误差可以自动的进行纠正,其控制精度较高
缺点:由于控制系统中总有储能元件存在,或传动装置中存在摩擦、间隙等非线性因素的影响,如果参数选择不适当将会引起闭环控制系统振荡,甚至不能工作;结构复杂,成本高
开环控制系统 / 闭环控制系统的选择:
开环:当系统的输入量能够预先知道,并且不存在任何扰动或干扰不大时
闭环:当存在无法预计的干扰因素或系统中元件参数存在无法预计的变化时(实际中运用更广泛)
复合控制系统
在输出和输入之间同时存在开环控制和闭环控制的系统
实质上是在闭环控制系统的基础上,用开环通路提供一个补偿的输入作用
兼具开环和闭环两种系统的优点,可以大大提高系统的性能
TODO: 按输入作用补偿、按扰动作用补偿 插图
也称为前馈(顺馈)控制系统
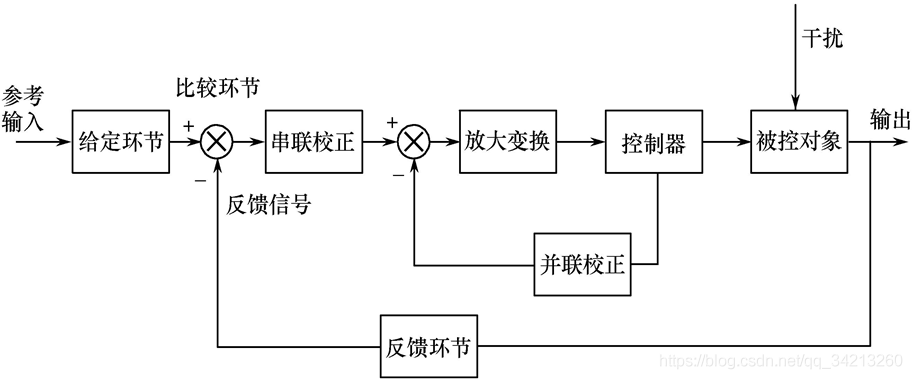
闭环控制系统的基本组成
给定元件
用来产生控制信号或输入信号(输入量) 的元件
反馈元件(检测元件)
用来测量(输出量)被控制量的实际值,并经过处理、转换为与输出量有一定函数关系的反馈量的元件
反馈量可以是输出量本身(单位反馈系统)或是与输出量成比例,或是输出量的其他函数
比较元件
用来对输入信号和反馈信号进行比较,得出偏差信号的元件
放大变换元件
对偏差信号进行信号放大和功率放大的元件
执行元件(驱动元件)
接收放大变换元件发出的控制信号,直接驱动被控对象工作,使输出量按照预期的规律运行
被控对象(控制对象)
控制系统需要进行控制的装置、设备或过程等
校正元件(校正装置)
为改善系统的性能而加入系统中的辅助元件(装置),而不是闭环控制系统必须具有的元件(装置)
串联校正装置:串联在系统前向通道内的校正元件
并联校正装置:接成反馈形式的校正元件
TODO:插图
第三节 控制系统的基本类型
按输入量、输出量的运动规律分类
恒值控制系统
输入量是一个不变化的恒值
系统的基本任务:排除各种干扰因素的影响,使被控制量(输出量)以一定精度等于系统的输入量
程序控制系统
输入量是变化的,且变化规律是预先确定了的已知的时间函数
系统的任务:使输出量按预先给定的规律(程序)变化
预先将被控制量的变化规律编制成程序,并记录在程序载体(输入介质)上,将其装在输入装置中。控制过程为程序载体按一定时间(或行程)顺序,发出控制指令,在输入装置中将其转换为控制信号,再经控制系统的作用,使被控对象按照指令的要求而运动
随动系统
输入量是变化规律预先不能确定的任意时间函数
系统的任务:保证输出量以一定精度跟随输入量的变化,并能克服各种干扰因素的影响,准确地复现输入信号的变化规律
按系统传递信号性质分类
连续控制系统
系统中的运动状态和各个部分所传输的信号都是连续变化的模拟量的系统
离散控制系统
系统中某一处或数出信号是以脉冲序列或数码的形式传递的系统
第四节 对控制系统的基本要求
稳定性
绝对稳定性:如果在输入量的作用下系统的输出量能够达到一个新的平衡状态或扰动量去掉以后系统的输出量能够恢复到原来的平衡状态,则系统是稳定的
相对稳定性:系统工作应考虑到满足一定的稳定性裕量,以免系统工作时因参数可能发生的变化而使系统失去稳定性
快速性
当系统的输出量与给定的输入量(或输出量的期望值)之间产生偏差时,消除这种偏差的快慢程度
- 系统对输入量的响应速度,表现为当输入量施加以后,系统输出量跟随输入量变化的迅速程度
- 振荡衰减的快慢程度,表现为系统输出量跟随输入量变化的瞬态响应过程(过渡时期)结束的迅速程度
准确性
稳态误差:输入量作用系统以后,当过渡过程结束时,输出量的实际值与输出量的期望值之间的差值