本篇对教材第二章到第五章的所有 MATLAB 例题进行了整理。部分代码与例题中的有所修改更正,并重新格式化。
第二章 微分方程与传递函数
例题1 绘制零-极点分布图
有一闭环控制系统,其传递函数为
Gb(s)=s3+2s2+3s+12s2+5s+1
,要求绘制其零-极点分布图。
1
2
3
4
5
6
| num = [2, 5, 1];
den = [1, 2, 3, 1];
pzmap(num, den);
sys = tf(num, den);
z = tzero(sys);
p = pole(sys);
|
TODO 图表
第三章 频率特性
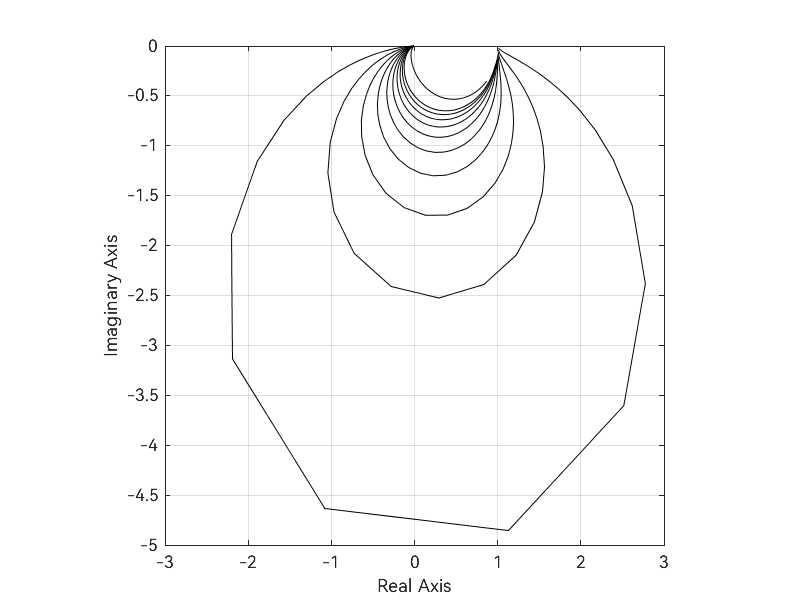
例题1 绘制奈奎斯特图(使用 plot)
有一系统传递函数为
G(s)=s2+2ζωns+ωn2ωn2
,试画出该系统在不同阻尼比情况下的 Nyquist 图。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| wn = 1;
zeta = [0.1:0.1:1, 2];
w = logspace(-1, 1, 100);
X = zeros(length(w), length(zeta));
Y = zeros(length(w), length(zeta));
for i = 1:length(zeta)
dd = wn^4 + w.^4 + 2 * (2 * zeta(i)^2 -1) * wn^2 * w.^2;
x = wn^2 * (wn^2 - w.^2) ./ dd;
y = -2 * zeta(i) * wn^3 * w ./ dd;
X(:, i) = x;
Y(:, i) = y;
end
plot(X, Y, '-k')
axis('square')
grid on;
xlabel('Real Axis')
ylabel('Imaginary Axis')
|
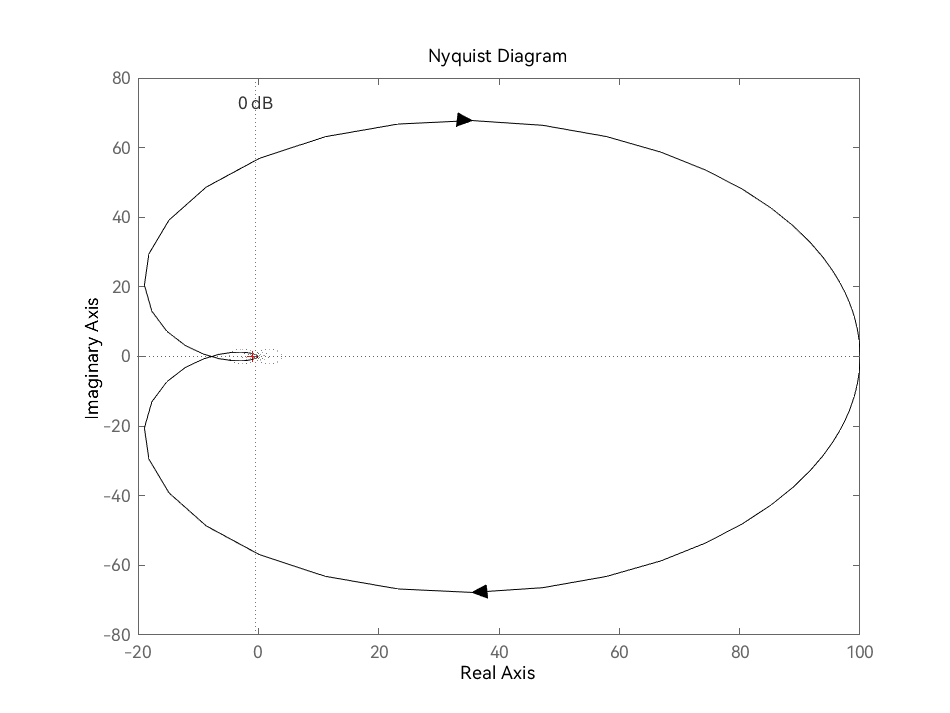
例题2 绘制奈奎斯特图(使用 nyquist )
有一系统的开环传递函数
G(s)=(s+1)(s+2)(s+5)1000
,试画出其奈奎斯特图。
1
2
3
4
| G = tf(1000, conv([1, 1], conv([1, 2], [1, 5])));
nyquist(G, '-k')
grid on
|
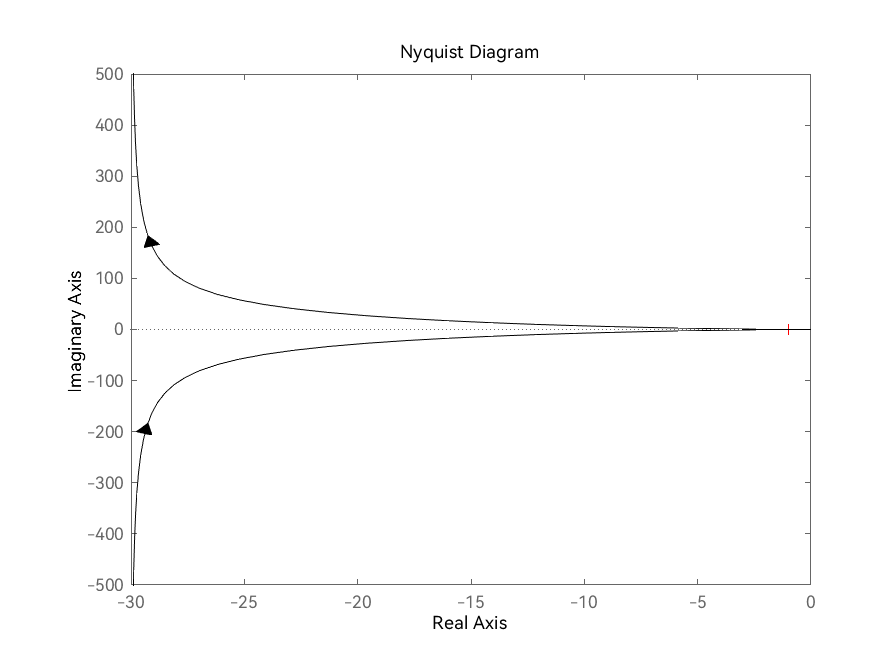
例题3 绘制奈奎斯特图(使用 nyquist )
已知某系统的开环传递函数为
G(s)=s(3s+1)10
,试绘制其奈奎斯特图。
1
2
3
| num = 10;
den = [3, 1, 0];
nyquist(num, den, '-k')
|
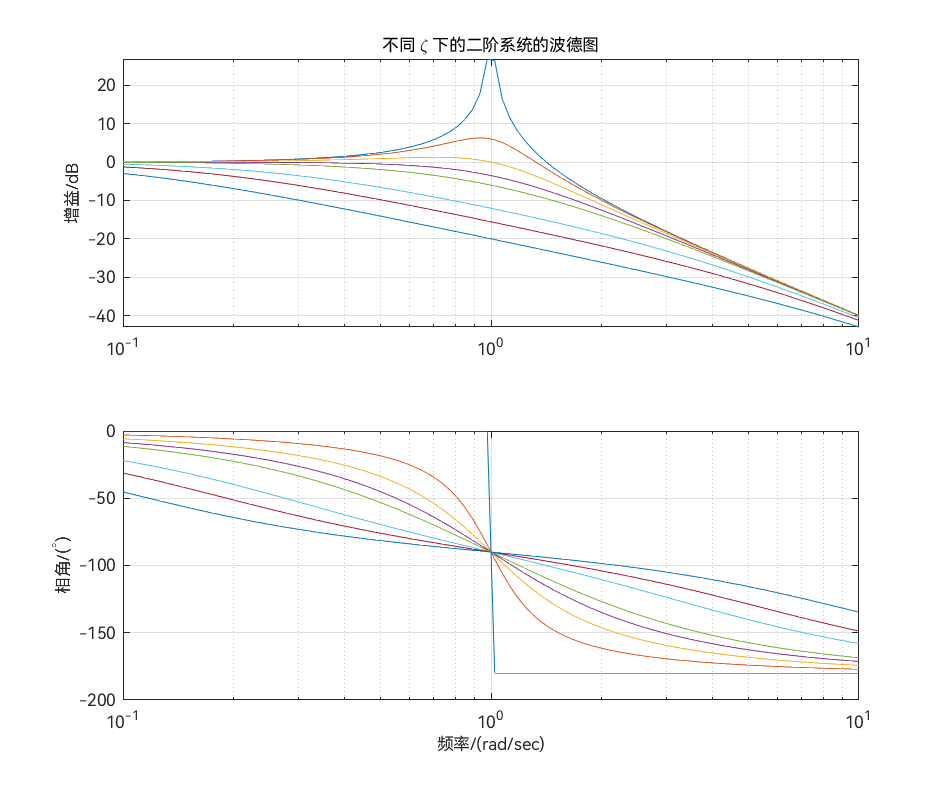
例题4 绘制波德图(使用 subplot)
传递函数为
G(s)=s2+2ζωns+ωn2ωn2
的二阶系统,试用 MATLAB 语言画出其波德图。
经计算可得其幅频特性和相频特性分别为
A(ω)=(ωn2−ω2)2+4ζωn2ω2ωn2
φ(ω)=−arctan(ωn2−ω22ζωnω)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| wn = 1;
zetas = [0:0.25:1, 2, 3, 5];
w = logspace(-1, 1, 100);
mm = zeros(length(w), length(zetas));
pp = zeros(length(w), length(zetas));
for i = 1:length(zetas)
m = wn^2 ./ sqrt((wn^2 - w.^2).^2 + 4 * zetas(i)^2 * wn^2 * w.^2);
p = atan2(-2 * zetas(i) * wn * w, wn^2 - w.^2);
pp(:, i) = 180 * p' / pi;
mm(:, i) = 20 * log10(m');
end
subplot(2, 1, 1)
semilogx(w, mm)
grid on
ylabel('增益/dB')
title('不同 \zeta 下的二阶系统的波德图')
subplot(2, 1, 2)
semilogx(w, pp)
grid on
ylabel('相角/(^{\circ})')
xlabel('频率/(rad/sec)')
|
例题5 绘制波德图(使用 bode)
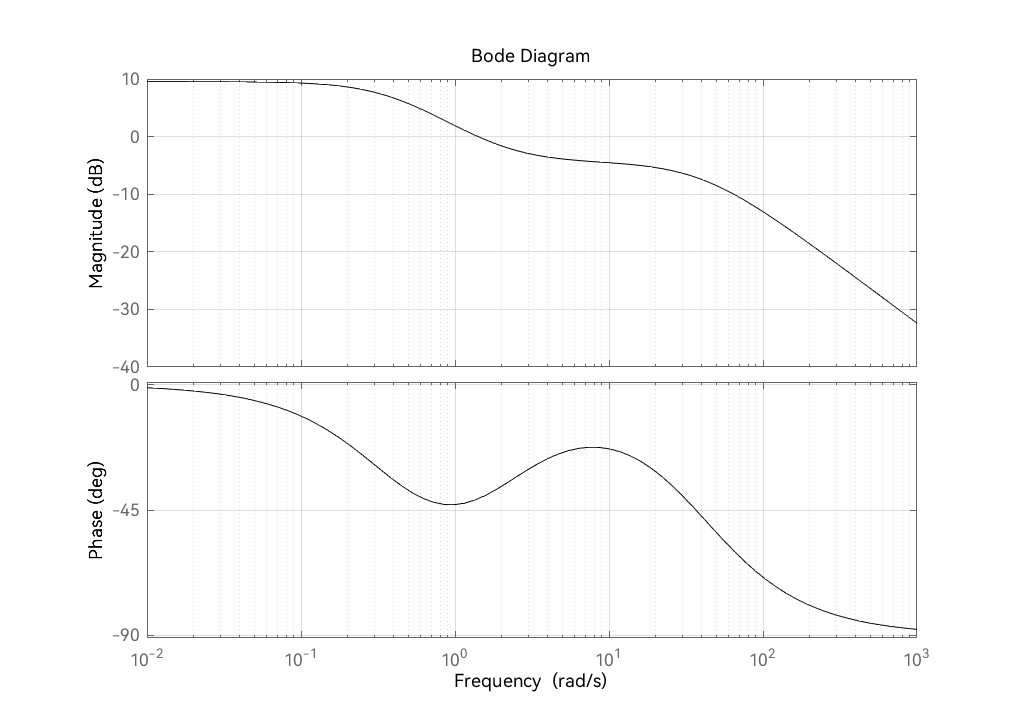
用 MATLAB 语言绘制传递函数为
G(s)=(2.5s+1)(0.025s+1)3(0.5s+1)
的系统的波德图。
1
2
3
| G = tf(3 * [0.5, 1], conv([2.5, 1], [0.025, 1]));
bode(G, '-k')
grid on
|
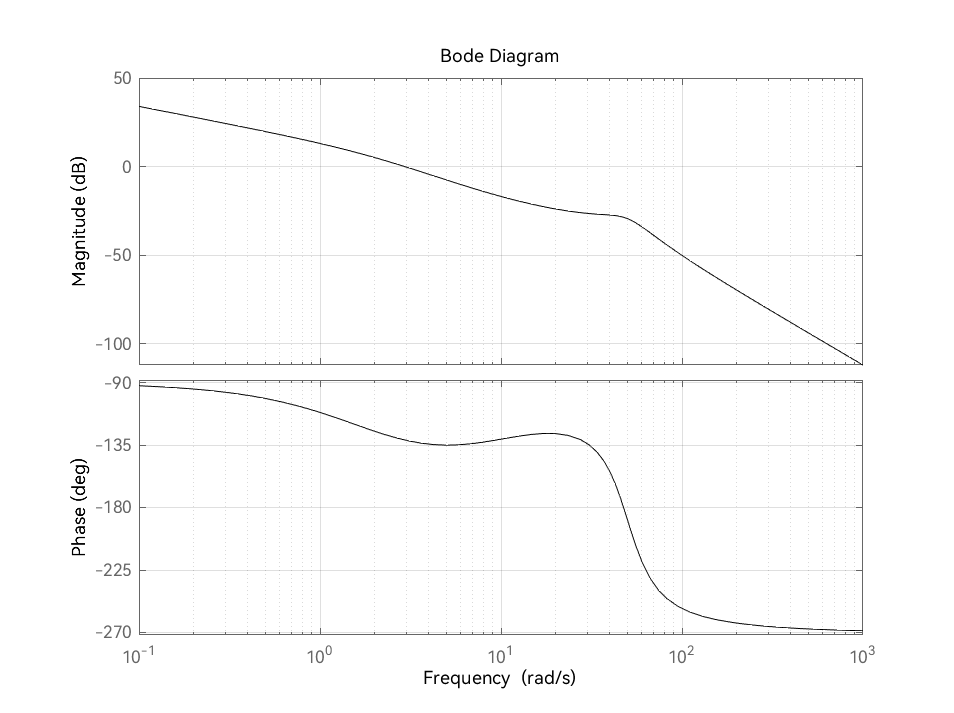
例题6 绘制波德图(使用 bode)
绘制传递函数为
G(s)=s(1+0.5s)(1+0.012s+0.0004s2)5(1+0.1s)
的系统的波德图。
1
2
3
| G = tf(5 * [0.1, 1], conv([1, 0], conv([0.5, 1], [0.0004, 0.012, 1])));
bode(G, '-k')
grid on
|
第四章 控制系统的稳定性分析
例题1 判别系统稳定性
系统的传递函数为
G(s)=s4+10s3+25s2+40s+25s3+5s2+20s+20
试用 MATLAB语言编程判别系统的稳定性。
1
2
3
4
| G = tf([1, 5, 20, 20], [1, 10, 25, 40, 25]);
roots(G.den{1})
|
例题2 求幅值裕量、相位裕量(margin)
设控制系统的开环传递函数为
G(s)H(s)=s(s+1)(s+5)k
当 k=10,k=100 时,判断系统是否稳定?求系统的幅值裕量 Kg 和相位裕量 γ
解:
由 G(s)H(s)=s(s+1)(s+5)k 的分母可知该系统开环稳定,将其化为标准环节的形式
G(s)H(s)=s(s+1)(5s+1)K
当 k=10 时,程序如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| GH = tf(10, conv([1, 0], conv([1, 1], [1, 5])));
sys = feedback(GH, 1);
p = pole(sys);
z = tzero(sys);
n1 = length(find(real(p) > 0));
n2 = length(find(real(z) > 0));
if (n1 > 0)
disp('系统不稳定!');
else
disp('系统稳定!');
end
if (n2 > 0)
disp('系统不是最小相位系统!');
end
[Gm, Pm, Wcg, Wcp] = margin(GH);
PGm = num2str(20 * log10(Gm));
PPm = num2str(Pm);
disp(['系统的幅值裕量为 ', PGm]);
disp(['系统的相位裕量为 ', PPm]);
margin(GH)
|
第五章 控制系统的时间响应及稳态误差分析
例1 绘制二阶闭环系统在不同阻尼比下的阶跃响应曲线
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
|
wn = 1;
zetas = [0:0.25:1, 2, 3, 5];
t = 0:0.1:12;
yy = zeros(length(zetas), length(t));
for i = 1:length(zetas)
z = zetas(i);
if z == 0
y = 1 - cos(wn * t);
elseif (z > 0 && z < 1)
wd = wn * sqrt(1 - z^2);
th = atan(sqrt(1 - z^2) / z);
y = 1 - exp(-z * wn * t) .* sin(wd * t + th) / sqrt(1 - z^2);
elseif z == 1
y = 1 - (1 + wn * t) .* exp(-wn * t);
elseif z > 1
lam1 = -z - sqrt(z^2 - 1);
lam2 = -z + sqrt(z^2 - 1);
y = 1 - 0.5 * wn * (exp(lam1 * t) / lam1 - exp(lam2 * t) / lam2) / sqrt(z^2 - 1);
end
yy(i, :) = y;
end
plot(t, yy)
title('二阶闭环系统在不同阻尼比下的阶跃响应')
xlabel('t')
ylabel('x_o(t)')
grid on
|
例题2 绘制系统的阶跃响应曲线
系统传递函数为
G(s)=s2+0.4s+11
试绘制该系统的阶跃响应曲线。
1
2
3
4
| num = 1;
den = [1, 0.4, 1];
G = tf(num, den);
step(G)
|
例题3 电机调速
TODO